Еще одна область исследований в области искусственного интеллекта — это нейронные сети. Они были разработаны по подобию естественных нейронных сетей нервной системы человека.
Искусственные нейронные сети
Изобретатель первого нейрокомпьютера, доктор Роберт Хехт-Нильсен, дал следующее понятие нейронной сети: «Нейронная сеть — это вычислительная система, состоящая из ряда простых, сильно взаимосвязанных элементов обработки, которые обрабатывают информацию путем их динамического реагирования на внешние воздействия».
Базовая структура искусственных нейронных сетей (ИНС)
Идея ИНС базируется на убеждении, что можно имитировать работу мозга человека, создав нужные связи с помощью кремния и проводов таких как у живых нейронов и дендритов.
Человеческий мозг состоит из 100 миллиардов нервных клеток, называемых нейронами. Они связаны с другими тысячами клеток Аксонами. Раздражители из внешней среды или сигналы от органов чувств принимаются дендритами. Эти входные сигналы создают электрические импульсы, которые быстро перемещаются через нейросеть. Затем нейрон может посылать сообщения на другие нейроны, которые могут отправить это сообщение дальше или могут вообще ее не отправлять.

Искусственные нейронные сети состоят из нескольких узлов, которые имитируют биологические нейроны человеческого мозга. Нейроны соединены между собой и взаимодействуют друг с другом. Узлы могут принимать входные данные и выполнять простейшие операции над данными. В результате этих операций данные передаются другим нейронам. Выходные данные для каждого узла называются его активацией.
Каждое звено связано с весом. ИНС способны к обучению, которое осуществляется путем изменения значения веса. На следующем рисунке показана простая ИНС:
Типы искусственных нейронных сетей
Есть два типа искусственных нейронных сетевых топологий — с прямой связью и обратной связью.
Поток информации является однонаправленным. Блок передает информацию на другие единицы, от которых он не получает никакой информации. Нет петли обратной связи. Они имеют фиксированные входы и выходы.

Здесь, допускаются петли обратной связи.

Как работают искусственные нейронные сети
В топологии показаны схемы, каждая стрелка представляет собой связь между двумя нейронами и указывает путь для потока информации. Каждая связь имеет вес, целое число, которое контролирует сигнал между двумя нейронами.
Если сеть создает «хороший» и «нужный» выход, то нет необходимости корректировать вес. Однако если сеть создает «плохой» или «нежелательный» вывод или ошибку, то система корректирует свои весовые коэффициенты для улучшения последующих результатов.
Машинное обучение в искусственных нейронных сетях
ИНС способны к обучению, и они должны быть обучены. Существует несколько стратегий обучения
Обучение — включает в себя учителя, который подает в сеть обучающую выборку на которые учитель знает ответы. Сеть сравнивает свои результаты с ответами учителя и корректирует свои весовые коэффициенты.
Обучение без учителя — это необходимо, когда нет обучающей выборки с известными ответами. Например в задачах кластеризации, т.е. деления множества элементов на группы по каким-то критериям.
Обучение с подкреплением — эта стратегия, построенная на наблюдении. Сеть принимает решение наблюдая за своим окружением. Если наблюдение является отрицательным, сеть корректирует свои веса, чтобы иметь возможность делать разные необходимые решения.
Алгоритм обратного распространения
Байесовские сети (БС)
Эти графические структуры для представления вероятностных отношений между набором случайных переменных.
В этих сетях каждый узел представляет собой случайную переменную с конкретными предложениями. Например, в медицинской диагностике, узел Рак представляет собой предложение, что пациент имеет рак.
Ребра, соединяющие узлы представляют собой вероятностные зависимости между этими случайными величинами. Если из двух узлов, один влияет на другой узел, то они должны быть связаны напрямую. Сила связи между переменными количественно определяется вероятностью, которая связан с каждым узлом.
Есть только ограничение на дугах в БН, вы не можете вернуться обратно к узле просто следуя по направлению дуги. Отсюда БНС называют ациклическим графом.
Структура БН идеально подходит для объединения знаний и наблюдаемых данных. БН могут быть использованы, чтобы узнать причинно-следственные связи и понимать различные проблемы и предсказывать будущее, даже в случае отсутствия данных.
Где используются нейронные сети
Они способны выполнять задачи, которые просты для человека, но затруднительны для машин:
Аэрокосмические — автопилот самолета;
Автомобильные — автомобильные системы наведения;
Военные — сопровождение цели, автопилот, распознавание сигнала/изображения;
Электроника — прогнозирование, анализ неисправностей, машинное зрение, синтез голоса;
Финансовые — оценка недвижимости, кредитные консультанты, ипотека, портфель торговой компании и др.
Обработка сигнала — нейронные сети могут быть обучены для обработки звукового сигнала.
Что такое нейронная сеть?

Нейронная сеть - это последовательность нейронов, соединенных между собой синапсами. Структура нейронной сети пришла в мир программирования прямиком из биологии. Благодаря такой структуре, машина обретает способность анализировать и даже запоминать различную информацию. Нейронные сети также способны не только анализировать входящую информацию, но и воспроизводить ее из своей памяти. Заинтересовавшимся обязательно к просмотру 2 видео из TED Talks: Видео 1 , Видео 2). Другими словами, нейросеть это машинная интерпретация мозга человека, в котором находятся миллионы нейронов передающих информацию в виде электрических импульсов.
Какие бывают нейронные сети?
Пока что мы будем рассматривать примеры на самом базовом типе нейронных сетей - это сеть прямого распространения (далее СПР). Также в последующих статьях я введу больше понятий и расскажу вам о рекуррентных нейронных сетях. СПР как вытекает из названия это сеть с последовательным соединением нейронных слоев, в ней информация всегда идет только в одном направлении.Для чего нужны нейронные сети?
Нейронные сети используются для решения сложных задач, которые требуют аналитических вычислений подобных тем, что делает человеческий мозг. Самыми распространенными применениями нейронных сетей является:Классификация - распределение данных по параметрам. Например, на вход дается набор людей и нужно решить, кому из них давать кредит, а кому нет. Эту работу может сделать нейронная сеть, анализируя такую информацию как: возраст, платежеспособность, кредитная история и тд.
Предсказание - возможность предсказывать следующий шаг. Например, рост или падение акций, основываясь на ситуации на фондовом рынке.
Распознавание - в настоящее время, самое широкое применение нейронных сетей. Используется в Google, когда вы ищете фото или в камерах телефонов, когда оно определяет положение вашего лица и выделяет его и многое другое.
Теперь, чтобы понять, как же работают нейронные сети, давайте взглянем на ее составляющие и их параметры.
Что такое нейрон?

Нейрон - это вычислительная единица, которая получает информацию, производит над ней простые вычисления и передает ее дальше. Они делятся на три основных типа: входной (синий), скрытый (красный) и выходной (зеленый). Также есть нейрон смещения и контекстный нейрон о которых мы поговорим в следующей статье. В том случае, когда нейросеть состоит из большого количества нейронов, вводят термин слоя. Соответственно, есть входной слой, который получает информацию, n скрытых слоев (обычно их не больше 3), которые ее обрабатывают и выходной слой, который выводит результат. У каждого из нейронов есть 2 основных параметра: входные данные (input data) и выходные данные (output data). В случае входного нейрона: input=output. В остальных, в поле input попадает суммарная информация всех нейронов с предыдущего слоя, после чего, она нормализуется, с помощью функции активации (пока что просто представим ее f(x)) и попадает в поле output.

Важно помнить , что нейроны оперируют числами в диапазоне или [-1,1]. А как же, вы спросите, тогда обрабатывать числа, которые выходят из данного диапазона? На данном этапе, самый простой ответ - это разделить 1 на это число. Этот процесс называется нормализацией, и он очень часто используется в нейронных сетях. Подробнее об этом чуть позже.
Что такое синапс?

Синапс это связь между двумя нейронами. У синапсов есть 1 параметр - вес. Благодаря ему, входная информация изменяется, когда передается от одного нейрона к другому. Допустим, есть 3 нейрона, которые передают информацию следующему. Тогда у нас есть 3 веса, соответствующие каждому из этих нейронов. У того нейрона, у которого вес будет больше, та информация и будет доминирующей в следующем нейроне (пример - смешение цветов). На самом деле, совокупность весов нейронной сети или матрица весов - это своеобразный мозг всей системы. Именно благодаря этим весам, входная информация обрабатывается и превращается в результат.
Важно помнить , что во время инициализации нейронной сети, веса расставляются в случайном порядке.
Как работает нейронная сеть?

В данном примере изображена часть нейронной сети, где буквами I обозначены входные нейроны, буквой H - скрытый нейрон, а буквой w - веса. Из формулы видно, что входная информация - это сумма всех входных данных, умноженных на соответствующие им веса. Тогда дадим на вход 1 и 0. Пусть w1=0.4 и w2 = 0.7 Входные данные нейрона Н1 будут следующими: 1*0.4+0*0.7=0.4. Теперь когда у нас есть входные данные, мы можем получить выходные данные, подставив входное значение в функцию активации (подробнее о ней далее). Теперь, когда у нас есть выходные данные, мы передаем их дальше. И так, мы повторяем для всех слоев, пока не дойдем до выходного нейрона. Запустив такую сеть в первый раз мы увидим, что ответ далек от правильно, потому что сеть не натренирована. Чтобы улучшить результаты мы будем ее тренировать. Но прежде чем узнать как это делать, давайте введем несколько терминов и свойств нейронной сети.
Функция активации
Функция активации - это способ нормализации входных данных (мы уже говорили об этом ранее). То есть, если на входе у вас будет большое число, пропустив его через функцию активации, вы получите выход в нужном вам диапазоне. Функций активации достаточно много поэтому мы рассмотрим самые основные: Линейная, Сигмоид (Логистическая) и Гиперболический тангенс. Главные их отличия - это диапазон значений.Линейная функция

Эта функция почти никогда не используется, за исключением случаев, когда нужно протестировать нейронную сеть или передать значение без преобразований.
Сигмоид

Это самая распространенная функция активации, ее диапазон значений . Именно на ней показано большинство примеров в сети, также ее иногда называют логистической функцией. Соответственно, если в вашем случае присутствуют отрицательные значения (например, акции могут идти не только вверх, но и вниз), то вам понадобиться функция которая захватывает и отрицательные значения.
Гиперболический тангенс

Имеет смысл использовать гиперболический тангенс, только тогда, когда ваши значения могут быть и отрицательными, и положительными, так как диапазон функции [-1,1]. Использовать эту функцию только с положительными значениями нецелесообразно так как это значительно ухудшит результаты вашей нейросети.
Тренировочный сет
Тренировочный сет - это последовательность данных, которыми оперирует нейронная сеть. В нашем случае исключающего или (xor) у нас всего 4 разных исхода то есть у нас будет 4 тренировочных сета: 0xor0=0, 0xor1=1, 1xor0=1,1xor1=0.Итерация
Это своеобразный счетчик, который увеличивается каждый раз, когда нейронная сеть проходит один тренировочный сет. Другими словами, это общее количество тренировочных сетов пройденных нейронной сетью.Эпоха
При инициализации нейронной сети эта величина устанавливается в 0 и имеет потолок, задаваемый вручную. Чем больше эпоха, тем лучше натренирована сеть и соответственно, ее результат. Эпоха увеличивается каждый раз, когда мы проходим весь набор тренировочных сетов, в нашем случае, 4 сетов или 4 итераций.
Важно не путать итерацию с эпохой и понимать последовательность их инкремента. Сначала n
раз увеличивается итерация, а потом уже эпоха и никак не наоборот. Другими словами, нельзя сначала тренировать нейросеть только на одном сете, потом на другом и тд. Нужно тренировать каждый сет один раз за эпоху. Так, вы сможете избежать ошибок в вычислениях.
Ошибка
Ошибка - это процентная величина, отражающая расхождение между ожидаемым и полученным ответами. Ошибка формируется каждую эпоху и должна идти на спад. Если этого не происходит, значит, вы что-то делаете не так. Ошибку можно вычислить разными путями, но мы рассмотрим лишь три основных способа: Mean Squared Error (далее MSE), Root MSE и Arctan. Здесь нет какого-либо ограничения на использование, как в функции активации, и вы вольны выбрать любой метод, который будет приносить вам наилучший результат. Стоит лишь учитывать, что каждый метод считает ошибки по разному. У Arctan, ошибка, почти всегда, будет больше, так как он работает по принципу: чем больше разница, тем больше ошибка. У Root MSE будет наименьшая ошибка, поэтому, чаще всего, используют MSE, которая сохраняет баланс в вычислении ошибки.Добрый день, меня зовут Наталия Ефремова, и я research scientist в компании NtechLab. Сегодня я буду рассказывать про виды нейронных сетей и их применение.
Сначала скажу пару слов о нашей компании. Компания новая, может быть многие из вас еще не знают, чем мы занимаемся. В прошлом году мы выиграли состязание MegaFace . Это международное состязание по распознаванию лиц. В этом же году была открыта наша компания, то есть мы на рынке уже около года, даже чуть больше. Соответственно, мы одна из лидирующих компаний в распознавании лиц и обработке биометрических изображений.
Первая часть моего доклада будет направлена тем, кто незнаком с нейронными сетями. Я занимаюсь непосредственно deep learning. В этой области я работаю более 10 лет. Хотя она появилась чуть меньше, чем десятилетие назад, раньше были некие зачатки нейронных сетей, которые были похожи на систему deep learning.
В последние 10 лет deep learning и компьютерное зрение развивались неимоверными темпами. Все, что сделано значимого в этой области, произошло в последние лет 6.
Я расскажу о практических аспектах: где, когда, что применять в плане deep learning для обработки изображений и видео, для распознавания образов и лиц, поскольку я работаю в компании, которая этим занимается. Немножко расскажу про распознавание эмоций, какие подходы используются в играх и робототехнике. Также я расскажу про нестандартное применение deep learning, то, что только выходит из научных институтов и пока что еще мало применяется на практике, как это может применяться, и почему это сложно применить.
Доклад будет состоять из двух частей. Так как большинство знакомы с нейронными сетями, сначала я быстро расскажу, как работают нейронные сети, что такое биологические нейронные сети, почему нам важно знать, как это работает, что такое искусственные нейронные сети, и какие архитектуры в каких областях применяются.
Сразу извиняюсь, я буду немного перескакивать на английскую терминологию, потому что большую часть того, как называется это на русском языке, я даже не знаю. Возможно вы тоже.
Итак, первая часть доклада будет посвящена сверточным нейронным сетям. Я расскажу, как работают convolutional neural network (CNN), распознавание изображений на примере из распознавания лиц. Немного расскажу про рекуррентные нейронные сети recurrent neural network (RNN) и обучение с подкреплением на примере систем deep learning.
В качестве нестандартного применения нейронных сетей я расскажу о том, как CNN работает в медицине для распознавания воксельных изображений, как используются нейронные сети для распознавания бедности в Африке.
Что такое нейронные сети
Прототипом для создания нейронных сетей послужили, как это ни странно, биологические нейронные сети. Возможно, многие из вас знают, как программировать нейронную сеть, но откуда она взялась, я думаю, некоторые не знают. Две трети всей сенсорной информации, которая к нам попадает, приходит с зрительных органов восприятия. Более одной трети поверхности нашего мозга заняты двумя самыми главными зрительными зонами - дорсальный зрительный путь и вентральный зрительный путь.Дорсальный зрительный путь начинается в первичной зрительной зоне, в нашем темечке и продолжается наверх, в то время как вентральный путь начинается на нашем затылке и заканчивается примерно за ушами. Все важное распознавание образов, которое у нас происходит, все смыслонесущее, то что мы осознаём, проходит именно там же, за ушами.
Почему это важно? Потому что часто нужно для понимания нейронных сетей. Во-первых, все об этом рассказывают, и я уже привыкла что так происходит, а во-вторых, дело в том, что все области, которые используются в нейронных сетях для распознавания образов, пришли к нам именно из вентрального зрительного пути, где каждая маленькая зона отвечает за свою строго определенную функцию.
Изображение попадает к нам из сетчатки глаза, проходит череду зрительных зон и заканчивается в височной зоне.
В далекие 60-е годы прошлого века, когда только начиналось изучение зрительных зон мозга, первые эксперименты проводились на животных, потому что не было fMRI. Исследовали мозг с помощью электродов, вживлённых в различные зрительные зоны.
Первая зрительная зона была исследована Дэвидом Хьюбелем и Торстеном Визелем в 1962 году. Они проводили эксперименты на кошках. Кошкам показывались различные движущиеся объекты. На что реагировали клетки мозга, то и было тем стимулом, которое распознавало животное. Даже сейчас многие эксперименты проводятся этими драконовскими способами. Но тем не менее это самый эффективный способ узнать, что делает каждая мельчайшая клеточка в нашем мозгу.
Таким же способом были открыты еще многие важные свойства зрительных зон, которые мы используем в deep learning сейчас. Одно из важнейших свойств - это увеличение рецептивных полей наших клеток по мере продвижения от первичных зрительных зон к височным долям, то есть более поздним зрительным зонам. Рецептивное поле - это та часть изображения, которую обрабатывает каждая клеточка нашего мозга. У каждой клетки своё рецептивное поле. Это же свойство сохраняется и в нейронных сетях, как вы, наверное, все знаете.
Также с возрастанием рецептивных полей увеличиваются сложные стимулы, которые обычно распознают нейронные сети.

Здесь вы видите примеры сложности стимулов, различных двухмерных форм, которые распознаются в зонах V2, V4 и различных частях височных полей у макак. Также проводятся некоторое количество экспериментов на МРТ.

Здесь вы видите, как проводятся такие эксперименты. Это 1 нанометровая часть зон IT cortex"a мартышки при распознавании различных объектов. Подсвечено то, где распознается.
Просуммируем. Важное свойство, которое мы хотим перенять у зрительных зон - это то, что возрастают размеры рецептивных полей, и увеличивается сложность объектов, которые мы распознаем.
Компьютерное зрение
До того, как мы научились это применять к компьютерному зрению - в общем, как такового его не было. Во всяком случае, оно работало не так хорошо, как работает сейчас.Все эти свойства мы переносим в нейронную сеть, и вот оно заработало, если не включать небольшое отступление к датасетам, о котором расскажу попозже.
Но сначала немного о простейшем перцептроне. Он также образован по образу и подобию нашего мозга. Простейший элемент напоминающий клетку мозга - нейрон. Имеет входные элементы, которые по умолчанию располагаются слева направо, изредка снизу вверх. Слева это входные части нейрона, справа выходные части нейрона.
Простейший перцептрон способен выполнять только самые простые операции. Для того, чтобы выполнять более сложные вычисления, нам нужна структура с большим количеством скрытых слоёв.

В случае компьютерного зрения нам нужно еще больше скрытых слоёв. И только тогда система будет осмысленно распознавать то, что она видит.
Итак, что происходит при распознавании изображения, я расскажу на примере лиц.
Для нас посмотреть на эту картинку и сказать, что на ней изображено именно лицо статуи, достаточно просто. Однако до 2010 года для компьютерного зрения это было невероятно сложной задачей. Те, кто занимался этим вопросом до этого времени, наверное, знают насколько тяжело было описать объект, который мы хотим найти на картинке без слов.
Нам нужно это было сделать каким-то геометрическим способом, описать объект, описать взаимосвязи объекта, как могут эти части относиться к друг другу, потом найти это изображение на объекте, сравнить их и получить, что мы распознали плохо. Обычно это было чуть лучше, чем подбрасывание монетки. Чуть лучше, чем chance level.
Сейчас это происходит не так. Мы разбиваем наше изображение либо на пиксели, либо на некие патчи: 2х2, 3х3, 5х5, 11х11 пикселей - как удобно создателям системы, в которой они служат входным слоем в нейронную сеть.
Сигналы с этих входных слоёв передаются от слоя к слою с помощью синапсов, каждый из слоёв имеет свои определенные коэффициенты. Итак, мы передаём от слоя к слою, от слоя к слою, пока мы не получим, что мы распознали лицо.
Условно все эти части можно разделить на три класса, мы их обозначим X, W и Y, где Х - это наше входное изображение, Y - это набор лейблов, и нам нужно получить наши веса. Как мы вычислим W?
При наличии нашего Х и Y это, кажется, просто. Однако то, что обозначено звездочкой, очень сложная нелинейная операция, которая, к сожалению, не имеет обратной. Даже имея 2 заданных компоненты уравнения, очень сложно ее вычислить. Поэтому нам нужно постепенно, методом проб и ошибок, подбором веса W сделать так, чтобы ошибка максимально уменьшилась, желательно, чтобы стала равной нулю.

Этот процесс происходит итеративно, мы постоянно уменьшаем, пока не находим то значение веса W, которое нас достаточно устроит.
К слову, ни одна нейронная сеть, с которой я работала, не достигала ошибки, равной нулю, но работала при этом достаточно хорошо.

Перед вами первая сеть, которая победила на международном соревновании ImageNet в 2012 году. Это так называемый AlexNet. Это сеть, которая впервые заявила о себе, о том, что существует convolutional neural networks и с тех самых пор на всех международных состязаниях уже convolutional neural nets не сдавали своих позиций никогда.
Несмотря на то, что эта сеть достаточно мелкая (в ней всего 7 скрытых слоёв), она содержит 650 тысяч нейронов с 60 миллионами параметров. Для того, чтобы итеративно научиться находить нужные веса, нам нужно очень много примеров.
Нейронная сеть учится на примере картинки и лейбла. Как нас в детстве учат «это кошка, а это собака», так же нейронные сети обучаются на большом количестве картинок. Но дело в том, что до 2010 не существовало достаточно большого data set’a, который способен был бы научить такое количество параметров распознавать изображения.
Самые большие базы данных, которые существовали до этого времени: PASCAL VOC, в который было всего 20 категорий объектов, и Caltech 101, который был разработан в California Institute of Technology. В последнем была 101 категория, и это было много. Тем же, кто не сумел найти свои объекты ни в одной из этих баз данных, приходилось стоить свои базы данных, что, я скажу, страшно мучительно.
Однако, в 2010 году появилась база ImageNet, в которой было 15 миллионов изображений, разделённые на 22 тысячи категорий. Это решило нашу проблему обучения нейронных сетей. Сейчас все желающие, у кого есть какой-либо академический адрес, могут спокойно зайти на сайт базы, запросить доступ и получить эту базу для тренировки своих нейронных сетей. Они отвечают достаточно быстро, по-моему, на следующий день.
По сравнению с предыдущими data set’ами, это очень большая база данных.
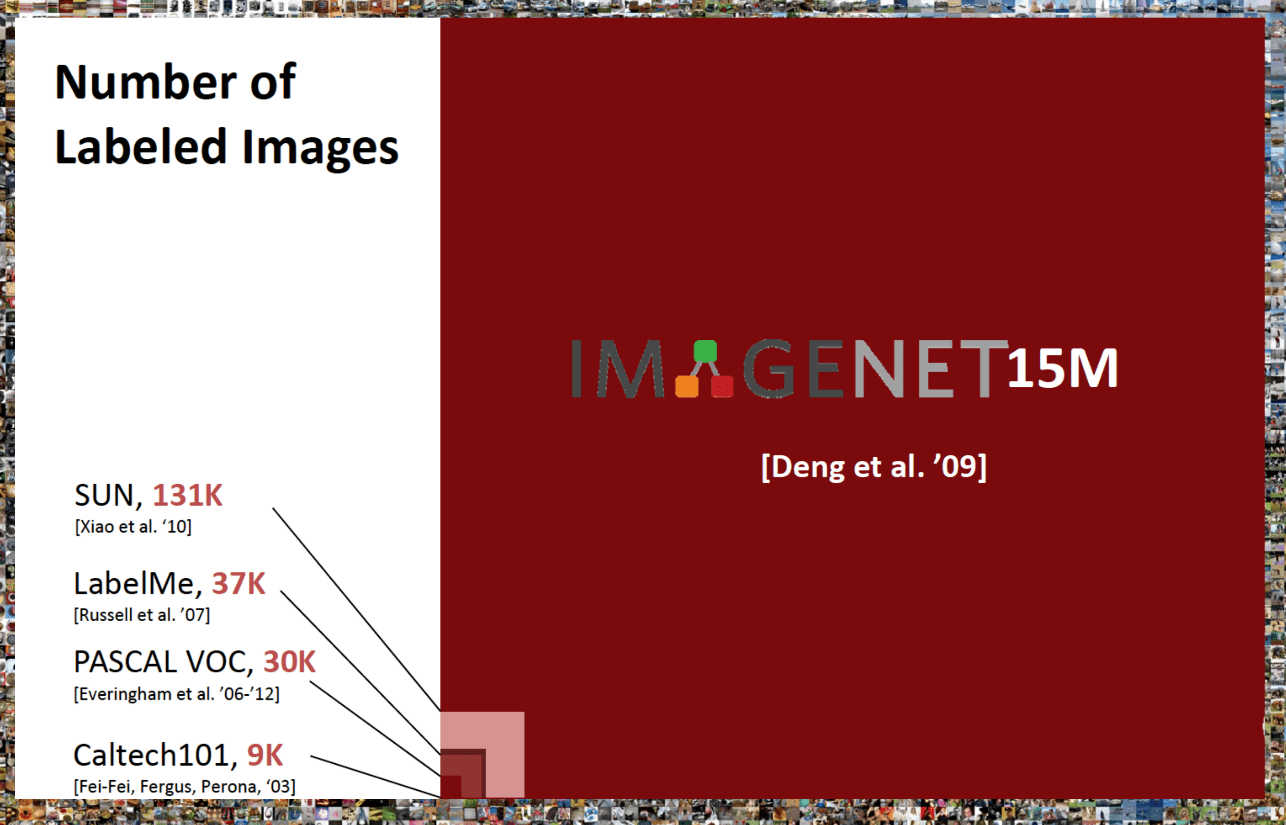
На примере видно, насколько было незначительно все то, что было до неё. Одновременно с базой ImageNet появилось соревнование ImageNet, международный challenge, в котором все команды, желающие посоревноваться, могут принять участие.
В этом году победила сеть, созданная в Китае, в ней было 269 слоёв. Не знаю, сколько параметров, подозреваю, тоже много.
Архитектура глубинной нейронной сети
Условно ее можно разделить на 2 части: те, которые учатся, и те, которые не учатся.
Чёрным обозначены те части, которые не учатся, все остальные слои способны обучаться. Существует множество определений того, что находится внутри каждого сверточного слоя. Одно из принятых обозначений - один слой с тремя компонентами разделяют на convolution stage, detector stage и pooling stage.
Не буду вдаваться в детали, еще будет много докладов, в которых подробно рассмотрено, как это работает. Расскажу на примере.
Поскольку организаторы просили меня не упоминать много формул, я их выкинула совсем.

Итак, входное изображение попадает в сеть слоёв, которые можно назвать фильтрами разного размера и разной сложности элементов, которые они распознают. Эти фильтры составляют некий свой индекс или набор признаков, который потом попадает в классификатор. Обычно это либо SVM, либо MLP - многослойный перцептрон, кому что удобно.
По образу и подобию с биологической нейронной сетью объекты распознаются разной сложности. По мере увеличения количества слоёв это все потеряло связь с cortex’ом, поскольку там ограничено количество зон в нейронной сети. 269 или много-много зон абстракции, поэтому сохраняется только увеличение сложности, количества элементов и рецептивных полей.

Если рассмотреть на примере распознавания лиц, то у нас рецептивное поле первого слоя будет маленьким, потом чуть побольше, побольше, и так до тех пор, пока наконец мы не сможем распознавать уже лицо целиком.

С точки зрения того, что находится у нас внутри фильтров, сначала будут наклонные палочки плюс немного цвета, затем части лиц, а потом уже целиком лица будут распознаваться каждой клеточкой слоя.
Есть люди, которые утверждают, что человек всегда распознаёт лучше, чем сеть. Так ли это?
В 2014 году ученые решили проверить, насколько мы хорошо распознаем в сравнении с нейронными сетями. Они взяли 2 самые лучшие на данный момент сети - это AlexNet и сеть Мэттью Зиллера и Фергюса, и сравнили с откликом разных зон мозга макаки, которая тоже была научена распознавать какие-то объекты. Объекты были из животного мира, чтобы обезьяна не запуталась, и были проведены эксперименты, кто же распознаёт лучше.
Так как получить отклик от мартышки внятно невозможно, ей вживили электроды и мерили непосредственно отклик каждого нейрона.
Оказалось, что в нормальных условиях клетки мозга реагировали так же хорошо, как и state of the art model на тот момент, то есть сеть Мэттью Зиллера.
Однако при увеличении скорости показа объектов, увеличении количества шумов и объектов на изображении скорость распознавания и его качество нашего мозга и мозга приматов сильно падают. Даже самая простая сверточная нейронная сеть распознаёт объекты лучше. То есть официально нейронные сети работают лучше, чем наш мозг.
Классические задачи сверточных нейронных сетей
Их на самом деле не так много, они относятся к трём классам. Среди них - такие задачи, как идентификация объекта, семантическая сегментация, распознавание лиц, распознавание частей тела человека, семантическое определение границ, выделение объектов внимания на изображении и выделение нормалей к поверхности. Их условно можно разделить на 3 уровня: от самых низкоуровневых задач до самых высокоуровневых задач.
На примере этого изображения рассмотрим, что делает каждая из задач.
- Определение границ - это самая низкоуровневая задача, для которой уже классически применяются сверточные нейронные сети.
- Определение вектора к нормали позволяет нам реконструировать трёхмерное изображение из двухмерного.
- Saliency, определение объектов внимания - это то, на что обратил бы внимание человек при рассмотрении этой картинки.
- Семантическая сегментация позволяет разделить объекты на классы по их структуре, ничего не зная об этих объектах, то есть еще до их распознавания.
- Семантическое выделение границ - это выделение границ, разбитых на классы.
- Выделение частей тела человека .
- И самая высокоуровневая задача - распознавание самих объектов , которое мы сейчас рассмотрим на примере распознавания лиц.
Распознавание лиц
Первое, что мы делаем - пробегаем face detector"ом по изображению для того, чтобы найти лицо. Далее мы нормализуем, центрируем лицо и запускаем его на обработку в нейронную сеть. После чего получаем набор или вектор признаков однозначно описывающий фичи этого лица.
Затем мы можем этот вектор признаков сравнить со всеми векторами признаков, которые хранятся у нас в базе данных, и получить отсылку на конкретного человека, на его имя, на его профиль - всё, что у нас может храниться в базе данных.
Именно таким образом работает наш продукт FindFace - это бесплатный сервис, который помогает искать профили людей в базе «ВКонтакте».
Кроме того, у нас есть API для компаний, которые хотят попробовать наши продукты. Мы предоставляем сервис по детектированию лиц, по верификации и по идентификации пользователей.
Сейчас у нас разработаны 2 сценария. Первый - это идентификация, поиск лица по базе данных. Второе - это верификация, это сравнение двух изображений с некой вероятностью, что это один и тот же человек. Кроме того, у нас сейчас в разработке распознавание эмоций, распознавание изображений на видео и liveness detection - это понимание, живой ли человек перед камерой или фотография.
Немного статистики. При идентификации, при поиске по 10 тысячам фото у нас точность около 95% в зависимости от качества базы, 99% точность верификации. И помимо этого данный алгоритм очень устойчив к изменениям - нам необязательно смотреть в камеру, у нас могут быть некие загораживающие предметы: очки, солнечные очки, борода, медицинская маска. В некоторых случаях мы можем победить даже такие невероятные сложности для компьютерного зрения, как и очки, и маска.
Очень быстрый поиск, затрачивается 0,5 секунд на обработку 1 миллиарда фотографий. Нами разработан уникальный индекс быстрого поиска. Также мы можем работать с изображениями низкого качества, полученных с CCTV-камер. Мы можем обрабатывать это все в режиме реального времени. Можно загружать фото через веб-интерфейс, через Android, iOS и производить поиск по 100 миллионам пользователей и их 250 миллионам фотографий.
Как я уже говорила мы заняли первое место на MegaFace competition - аналог для ImageNet, но для распознавания лиц. Он проводится уже несколько лет, в прошлом году мы были лучшими среди 100 команд со всего мира, включая Google.
Рекуррентные нейронные сети
Recurrent neural networks мы используем тогда, когда нам недостаточно распознавать только изображение. В тех случаях, когда нам важно соблюдать последовательность, нам нужен порядок того, что у нас происходит, мы используем обычные рекуррентные нейронные сети.Это применяется для распознавания естественного языка, для обработки видео, даже используется для распознавания изображений.
Про распознавание естественного языка я рассказывать не буду - после моего доклада еще будут два, которые будут направлены на распознавание естественного языка. Поэтому я расскажу про работу рекуррентных сетей на примере распознавания эмоций.
Что такое рекуррентные нейронные сети? Это примерно то же самое, что и обычные нейронные сети, но с обратной связью. Обратная связь нам нужна, чтобы передавать на вход нейронной сети или на какой-то из ее слоев предыдущее состояние системы.
Предположим, мы обрабатываем эмоции. Даже в улыбке - одной из самых простых эмоций - есть несколько моментов: от нейтрального выражения лица до того момента, когда у нас будет полная улыбка. Они идут друг за другом последовательно. Чтоб это хорошо понимать, нам нужно уметь наблюдать за тем, как это происходит, передавать то, что было на предыдущем кадре в следующий шаг работы системы.

В 2005 году на состязании Emotion Recognition in the Wild специально для распознавания эмоций команда из Монреаля представила рекуррентную систему, которая выглядела очень просто. У нее было всего несколько свёрточных слоев, и она работала исключительно с видео. В этом году они добавили также распознавание аудио и cагрегировали покадровые данные, которые получаются из convolutional neural networks, данные аудиосигнала с работой рекуррентной нейронной сети (с возвратом состояния) и получили первое место на состязании.
Обучение с подкреплением
Следующий тип нейронных сетей, который очень часто используется в последнее время, но не получил такой широкой огласки, как предыдущие 2 типа - это deep reinforcement learning, обучение с подкреплением.Дело в том, что в предыдущих двух случаях мы используем базы данных. У нас есть либо данные с лиц, либо данные с картинок, либо данные с эмоциями с видеороликов. Если у нас этого нет, если мы не можем это отснять, как научить робота брать объекты? Это мы делаем автоматически - мы не знаем, как это работает. Другой пример: составлять большие базы данных в компьютерных играх сложно, да и не нужно, можно сделать гораздо проще.
Все, наверное, слышали про успехи deep reinforcement learning в Atari и в го.
Кто слышал про Atari? Ну кто-то слышал, хорошо. Про AlphaGo думаю слышали все, поэтому я даже не буду рассказывать, что конкретно там происходит.

Что происходит в Atari? Слева как раз изображена архитектура этой нейронной сети. Она обучается, играя сама с собой для того, чтобы получить максимальное вознаграждение. Максимальное вознаграждение - это максимально быстрый исход игры с максимально большим счетом.
Справа вверху - последний слой нейронной сети, который изображает всё количество состояний системы, которая играла сама против себя всего лишь в течение двух часов. Красным изображены желательные исходы игры с максимальным вознаграждением, а голубым - нежелательные. Сеть строит некое поле и движется по своим обученным слоям в то состояние, которого ей хочется достичь.
В робототехнике ситуация состоит немного по-другому. Почему? Здесь у нас есть несколько сложностей. Во-первых, у нас не так много баз данных. Во-вторых, нам нужно координировать сразу три системы: восприятие робота, его действия с помощью манипуляторов и его память - то, что было сделано в предыдущем шаге и как это было сделано. В общем это все очень сложно.
Дело в том, что ни одна нейронная сеть, даже deep learning на данный момент, не может справится с этой задачей достаточно эффективно, поэтому deep learning только исключительно кусочки того, что нужно сделать роботам. Например, недавно Сергей Левин предоставил систему, которая учит робота хватать объекты.

Вот здесь показаны опыты, которые он проводил на своих 14 роботах-манипуляторах.
Что здесь происходит? В этих тазиках, которые вы перед собой видите, различные объекты: ручки, ластики, кружки поменьше и побольше, тряпочки, разные текстуры, разной жесткости. Неясно, как научить робота захватывать их. В течение многих часов, а даже, вроде, недель, роботы тренировались, чтобы уметь захватывать эти предметы, составлялись по этому поводу базы данных.
Базы данных - это некий отклик среды, который нам нужно накопить для того, чтобы иметь возможность обучить робота что-то делать в дальнейшем. В дальнейшем роботы будут обучаться на этом множестве состояний системы.
Нестандартные применения нейронных сетей
Это к сожалению, конец, у меня не много времени. Я расскажу про те нестандартные решения, которые сейчас есть и которые, по многим прогнозам, будут иметь некое приложение в будущем.Итак, ученые Стэнфорда недавно придумали очень необычное применение нейронной сети CNN для предсказания бедности. Что они сделали?
На самом деле концепция очень проста. Дело в том, что в Африке уровень бедности зашкаливает за все мыслимые и немыслимые пределы. У них нет даже возможности собирать социальные демографические данные. Поэтому с 2005 года у нас вообще нет никаких данных о том, что там происходит.
Учёные собирали дневные и ночные карты со спутников и скармливали их нейронной сети в течение некоторого времени.
Нейронная сеть была преднастроена на ImageNet"е. То есть первые слои фильтров были настроены так, чтобы она умела распознавать уже какие-то совсем простые вещи, например, крыши домов, для поиска поселения на дневных картах. Затем дневные карты были сопоставлены с картами ночной освещенности того же участка поверхности для того, чтобы сказать, насколько есть деньги у населения, чтобы хотя бы освещать свои дома в течение ночного времени.

Здесь вы видите результаты прогноза, построенного нейронной сетью. Прогноз был сделан с различным разрешением. И вы видите - самый последний кадр - реальные данные, собранные правительством Уганды в 2005 году.
Можно заметить, что нейронная сеть составила достаточно точный прогноз, даже с небольшим сдвигом с 2005 года.
Были конечно и побочные эффекты. Ученые, которые занимаются deep learning, всегда с удивлением обнаруживают разные побочные эффекты. Например, как те, что сеть научилась распознавать воду, леса, крупные строительные объекты, дороги - все это без учителей, без заранее построенных баз данных. Вообще полностью самостоятельно. Были некие слои, которые реагировали, например, на дороги.
И последнее применение о котором я хотела бы поговорить - семантическая сегментация 3D изображений в медицине. Вообще medical imaging - это сложная область, с которой очень сложно работать.
Для этого есть несколько причин.
- У нас очень мало баз данных. Не так легко найти картинку мозга, к тому же повреждённого, и взять ее тоже ниоткуда нельзя.
- Даже если у нас есть такая картинка, нужно взять медика и заставить его вручную размещать все многослойные изображения, что очень долго и крайне неэффективно. Не все медики имеют ресурсы для того, чтобы этим заниматься.
- Нужна очень высокая точность. Медицинская система не может ошибаться. При распознавании, например, котиков, не распознали - ничего страшного. А если мы не распознали опухоль, то это уже не очень хорошо. Здесь особо свирепые требования к надежности системы.
- Изображения в трехмерных элементах - вокселях, не в пикселях, что доставляет дополнительные сложности разработчикам систем.
Где это применяется: определение повреждений после удара, для поиска опухоли в мозгу, в кардиологии для определения того, как работает сердце.

Вот пример для определения объема плаценты.
Автоматически это работает хорошо, но не настолько, чтобы это было выпущено в производство, поэтому пока только начинается. Есть несколько стартапов для создания таких систем медицинского зрения. Вообще в deep learning очень много стартапов в ближайшее время. Говорят, что venture capitalists в последние полгода выделили больше бюджета на стартапы обрасти deep learning, чем за прошедшие 5 лет.
Эта область активно развивается, много интересных направлений. Мы с вами живем в интересное время. Если вы занимаетесь deep learning, то вам, наверное, пора открывать свой стартап.
Ну на этом я, наверное, закруглюсь. Спасибо вам большое.
Искусственный интеллект, нейронные сети, машинное обучение — что на самом деле означают все эти нынче популярные понятия? Для большинства непосвященных людей, коим и являюсь я сам, они всегда казались чем-то фантастическим, но на самом деле суть их лежит на поверхности. У меня давно созревала идея написать простым языком об искусственных нейронных сетях. Узнать самому и рассказать другим, что представляют собой эта технология, как она работают, рассмотреть ее историю и перспективы. В этой статье я постарался не залезать в дебри, а просто и популярно рассказать об этом перспективном направление в мире высоких технологий.
Искусственный интеллект, нейронные сети, машинное обучение - что на самом деле означают все эти нынче популярные понятия? Для большинства непосвященных людей, коим являюсь и я сам, они всегда казались чем-то фантастическим, но на самом деле суть их лежит на поверхности. У меня давно созревала идея написать простым языком об искусственных нейронных сетях. Узнать самому и рассказать другим, что представляет собой эта технология, как она работает, рассмотреть ее историю и перспективы. В этой статье я постарался не залезать в дебри, а просто и популярно рассказать об этом перспективном направление в мире высоких технологий.
Немного истории
Впервые понятие искусственных нейронных сетей (ИНС) возникло при попытке смоделировать процессы головного мозга. Первым серьезным прорывом в этой сфере можно считать создание модели нейронных сетей МакКаллока-Питтса в 1943 году. Учеными впервые была разработана модель искусственного нейрона. Ими также была предложена конструкция сети из этих элементов для выполнения логических операций. Но самое главное, учеными было доказано, что подобная сеть способна обучаться.

Следующим важным шагом стала разработка Дональдом Хеббом первого алгоритма вычисления ИНС в 1949 году, который стал основополагающем на несколько последующих десятилетий. В 1958 году Фрэнком Розенблаттом был разработан парцептрон - система, имитирующая процессы головного мозга. В свое время технология не имела аналогов и до сих пор является основополагающей в нейронных сетях. В 1986 году практически одновременно, независимо друг от друга американскими и советскими учеными был существенно доработан основополагающий метод обучения многослойного перцептрона . В 2007 году нейронные сети перенесли второе рождение. Британский информатик Джеффри Хинтоном впервые разработал алгоритм глубокого обучения многослойных нейронных сетей, который сейчас, например, используется для работы беспилотных автомобилей.
Коротко о главном
В общем смысле слова, нейронные сети - это математические модели, работающие по принципу сетей нервных клеток животного организма. ИНС могут быть реализованы как в программируемые, так и в аппаратные решения. Для простоты восприятия нейрон можно представить, как некую ячейку, у которой имеется множество входных отверстий и одно выходное. Каким образом многочисленные входящие сигналы формируются в выходящий, как раз и определяет алгоритм вычисления. На каждый вход нейрона подаются действенные значения, которые затем распространяются по межнейронным связям (синопсисам). У синапсов есть один параметр - вес, благодаря которому входная информация изменяется при переходе от одного нейрона к другому. Легче всего принцип работы нейросетей можно представить на примере смешения цветов. Синий, зеленый и красный нейрон имеют разные веса. Информация того нейрона, вес которого больше будет доминирующей в следующем нейроне.

Сама нейросеть представляет собой систему из множества таких нейронов (процессоров). По отдельности эти процессоры достаточно просты (намного проще, чем процессор персонального компьютера), но будучи соединенными в большую систему нейроны способны выполнять очень сложные задачи.
В зависимости от области применения нейросеть можно трактовать по-разному, Например, с точки зрения машинного обучения ИНС представляет собой метод распознавания образов. С математической точки зрения - это многопараметрическая задача. С точки зрения кибернетики - модель адаптивного управления робототехникой. Для искусственного интеллекта ИНС - это основополагающее составляющее для моделирования естественного интеллекта с помощью вычислительных алгоритмов.
Основным преимуществом нейросетей над обычными алгоритмами вычисления является их возможность обучения. В общем смысле слова обучение заключается в нахождении верных коэффициентов связи между нейронами, а также в обобщении данных и выявлении сложных зависимостей между входными и выходными сигналами. Фактически, удачное обучение нейросети означает, что система будет способна выявить верный результат на основании данных, отсутствующих в обучающей выборке.

Сегодняшнее положение
И какой бы многообещающей не была бы эта технология, пока что ИНС еще очень далеки от возможностей человеческого мозга и мышления. Тем не менее, уже сейчас нейросети применяются во многих сферах деятельности человека. Пока что они не способны принимать высокоинтеллектуальные решения, но в состоянии заменить человека там, где раньше он был необходим. Среди многочисленных областей применения ИНС можно отметить: создание самообучающихся систем производственных процессов, беспилотные транспортные средства, системы распознавания изображений, интеллектуальные охранные системы, робототехника, системы мониторинга качества, голосовые интерфейсы взаимодействия, системы аналитики и многое другое. Такое широкое распространение нейросетей помимо прочего обусловлено появлением различных способов ускорения обучения ИНС.

На сегодняшний день рынок нейронных сетей огромен - это миллиарды и миллиарды долларов. Как показывает практика, большинство технологий нейросетей по всему миру мало отличаются друг от друга. Однако применение нейросетей - это очень затратное занятие, которое в большинстве случаев могут позволить себе только крупные компании. Для разработки, обучения и тестирования нейронных сетей требуются большие вычислительные мощности, очевидно, что этого в достатке имеется у крупных игроков на рынке ИТ. Среди основных компаний, ведущих разработки в этой области можно отметить подразделение Google DeepMind, подразделение Microsoft Research, компании IBM, Facebook и Baidu.
Конечно, все это хорошо: нейросети развиваются, рынок растет, но пока что главная задача так и не решена. Человечеству не удалось создать технологию, хотя бы приближенную по возможностям к человеческому мозгу. Давайте рассмотрим основные различия между человеческим мозгом и искусственными нейросетями.
Почему нейросети еще далеки до человеческого мозга?
Самым главным отличием, которое в корне меняет принцип и эффективность работы системы - это разная передача сигналов в искусственных нейронных сетях и в биологической сети нейронов. Дело в том, что в ИНС нейроны передают значения, которые являются действительными значениями, то есть числами. В человеческом мозге осуществляется передача импульсов с фиксированной амплитудой, причем эти импульсы практически мгновенные. Отсюда вытекает целый ряд преимуществ человеческой сети нейронов.

Во-первых, линии связи в мозге намного эффективнее и экономичнее, чем в ИНС. Во-вторых, импульсная схема обеспечивает простоту реализации технологии: достаточно использование аналоговых схем вместо сложных вычислительных механизмов. В конечном счете, импульсные сети защищены от звуковых помех. Действенные числа подвержены влиянию шумов, в результате чего повышается вероятность возникновения ошибки.
Итог
Безусловно, в последнее десятилетие произошел настоящий бум развития нейронных сетей. В первую очередь это связано с тем, что процесс обучения ИНС стал намного быстрее и проще. Также стали активно разрабатываться так называемые «предобученные» нейросети, которые позволяют существенно ускорить процесс внедрения технологии. И если пока что рано говорить о том, смогут ли когда-то нейросети полностью воспроизвести возможности человеческого мозга, вероятность того, что в ближайшее десятилетие ИНС смогут заменить человека на четверти существующих профессий все больше становится похожим на правду.
Для тех, кто хочет знать больше
- Большая нейронная война: что на самом деле затевает Google
- Как когнитивные компьютеры могут изменить наше будущее
Интеллектуальные системы на основе искусственных нейронных сетей позволяют с успехом решать проблемы распознавания образов, выполнения прогнозов, оптимизации, ассоциативной памяти и управления.
17.04.1997 Жианчанг Мао, Энил Джейн
Интеллектуальные системы на основе искусственных нейронных сетей позволяют с успехом решать проблемы распознавания образов, выполнения прогнозов, оптимизации, ассоциативной памяти и управления. Известны и иные, более традиционные подходы к решению этих проблем, однако они не обладают необходимой гибкостью за пределами ограниченных условий. ИНС дают многообещающие альтернативные решения, и многие приложения выигрывают от их использования.
Интеллектуальные системы на основе искусственных нейронных сетей (ИНС) позволяют с успехом решать проблемы распознавания образов, выполнения прогнозов, оптимизации, ассоциативной памяти и управления. Известны и иные, более традиционные подходы к решению этих проблем, однако они не обладают необходимой гибкостью за пределами ограниченных условий. ИНС дают многообещающие альтернативные решения, и многие приложения выигрывают от их использования. Данная статья является введением в современную проблематику ИНС и содержит обсуждение причин их стремительного развития. Здесь описаны также основные принципы работы биологического нейрона и его искусственной вычислительной модели. Несколько слов будет сказано о нейросетевых архитектурах и процессах обучения ИНС. Венчает статью знакомство с проблемой распознавания текста - наиболее успешной реализацией ИНС.
Длительный период эволюции придал мозгу человека много качеств, которые отсутствуют как в машинах с архитектурой фон Неймана, так и в современных параллельных компьютерах. К ним относятся:
- массовый параллелизм;
- распределенное представление информации и вычисления;
- способность к обучению и способность к обобщению;
- адаптивность;
- свойство контекстуальной обработки информации;
- толерантность к ошибкам;
- низкое энергопотребление.
Можно предположить, что приборы, построенные на тех же принципах, что и биологические нейроны, будут обладать перечисленными характеристиками.
От биологических сетей к ИНС
Современные цифровые вычислительные машины превосходят человека по способности производить числовые и символьные вычисления. Однако человек может без усилий решать сложные задачи восприятия внешних данных (например, узнавание человека в толпе только по его промелькнувшему лицу) с такой скоростью и точностью, что мощнейший в мире компьютер по сравнению с ним кажется безнадежным тугодумом. В чем причина столь значительного различия в их производительности? Архитектура биологической нейронной системы совершенно не похожа на архитектуру машины фон Неймана (Таблица 1), существенно влияет на типы функций, которые более эффективно исполняются каждой моделью.
Таблица 1. Машина фон Неймана по сравнению с биологической нейронной системой
| Машина фон Неймана | Биологическая нейронная система | |
| Процессор | Сложный | Простой |
| Высокоскоростной | Низкоскоростной | |
| Один или несколько | Большое количество | |
| Память | Отделена от процессора | Интегрирована в процессор |
| Локализована | Распределенная | |
| Адресация не по содержанию | Адресация по содержанию | |
| Вычисления | Централизованные | Распределенные |
| Последовательные | Параллельные | |
| Хранимые программы | Самообучение | |
| Надежность | Высокая уязвимость | Живучесть |
| Специализация | Численные и символьные oперации | Проблемы восприятия |
| Среда функционирования | Строго определенная | Плохо определенная |
| Строго ограниченная | Без ограничений |
Подобно биологической нейронной системе ИНС является вычислительной системой с огромным числом параллельно функционирующих простых процессоров с множеством связей. Модели ИНС в некоторой степени воспроизводят "организационные" принципы, свойственные мозгу человека. Моделирование биологической нейронной системы с использованием ИНС может также способствовать лучшему пониманию биологических функций. Такие технологии производства, как VLSI (сверхвысокий уровень интеграции) и оптические аппаратные средства, делают возможным подобное моделирование.
Глубокое изучение ИНС требует знания нейрофизиологии, науки о познании, психологии, физики (статистической механики), теории управления, теории вычислений, проблем искусственного интеллекта, статистики/математики, распознавания образов, компьютерного зрения, параллельных вычислений и аппаратных средств (цифровых/аналоговых/VLSI/оптических). С другой стороны, ИНС также стимулируют эти дисциплины, обеспечивая их новыми инструментами и представлениями. Этот симбиоз жизненно необходим для исследований по нейронным сетям.
Представим некоторые проблемы, решаемые в контексте ИНС и представляющие интерес для ученых и инженеров.
Классификация образов. Задача состоит в указании принадлежности входного образа (например, речевого сигнала или рукописного символа), представленного вектором признаков, одному или нескольким предварительно определенным классам. К известным приложениям относятся распознавание букв, распознавание речи, классификация сигнала электрокардиограммы, классификация клеток крови.
Кластеризация/категоризация. При решении задачи кластеризации, которая известна также как классификация образов "без учителя", отсутствует обучающая выборка с метками классов. Алгоритм кластеризации основан на подобии образов и размещает близкие образы в один кластер. Известны случаи применения кластеризации для извлечения знаний, сжатия данных и исследования свойств данных.
Аппроксимация функций. Предположим, что имеется обучающая выборка ((x 1 ,y 1 ), (x 2 ,y 2 )..., (x n ,y n )) (пары данных вход-выход), которая генерируется неизвестной функцией (x), искаженной шумом. Задача аппроксимации состоит в нахождении оценки неизвестной функции (x). Аппроксимация функций необходима при решении многочисленных инженерных и научных задач моделирования.
Предсказание/прогноз. Пусть заданы n дискретных отсчетов {y(t 1 ), y(t 2 )..., y(t n )} в последовательные моменты времени t 1 , t 2 ,..., t n . Задача состоит в предсказании значения y(t n+1 ) в некоторый будущий момент времени t n+1 . Предсказание/прогноз имеют значительное влияние на принятие решений в бизнесе, науке и технике. Предсказание цен на фондовой бирже и прогноз погоды являются типичными приложениями техники предсказания/прогноза.
Оптимизация. Многочисленные проблемы в математике, статистике, технике, науке, медицине и экономике могут рассматриваться как проблемы оптимизации. Задачей алгоритма оптимизации является нахождение такого решения, которое удовлетворяет системе ограничений и максимизирует или минимизирует целевую функцию. Задача коммивояжера, относящаяся к классу NP-полных, является классическим примером задачи оптимизации.
Память, адресуемая по содержанию. В модели вычислений фон Неймана обращение к памяти доступно только посредством адреса, который не зависит от содержания памяти. Более того, если допущена ошибка в вычислении адреса, то может быть найдена совершенно иная информация. Ассоциативная память, или память, адресуемая по содержанию, доступна по указанию заданного содержания. Содержимое памяти может быть вызвано даже по частичному входу или искаженному содержанию. Ассоциативная память чрезвычайно желательна при создании мультимедийных информационных баз данных.
Управление. Рассмотрим динамическую систему, заданную совокупностью {u(t), y(t)}, где u(t) является входным управляющим воздействием, а y(t) - выходом системы в момент времени t. В системах управления с эталонной моделью целью управления является расчет такого входного воздействия u(t), при котором система следует по желаемой траектории, диктуемой эталонной моделью. Примером является оптимальное управление двигателем.
Краткий исторический обзор
Исследования в области ИНС пережили три периода активизации. Первый пик в 40-х годах обусловлен пионерской работой МакКаллока и Питтса . Второй возник в 60-х благодаря теореме сходимости перцептрона Розенблатта и работе Минского и Пейперта , указавшей ограниченные возможности простейшего перцептрона. Результаты Минского и Пейперта погасили энтузиазм большинства исследователей, особенно тех, кто работал в области вычислительных наук. Возникшее в исследованиях по нейронным сетям затишье продлилось почти 20 лет. С начала 80-х годов ИНС вновь привлекли интерес исследователей, что связано с энергетическим подходом Хопфилда и алгоритмом обратного распространения для обучения многослойного перцептрона (многослойные сети прямого распространения), впервые предложенного Вербосом и независимо разработанного рядом других авторов. Алгоритм получил известность благодаря Румельхарту в 1986году Андерсон и Розенфельд подготовили подробную историческую справку о развитии ИНС.
Биологические нейронные сети
Нейрон (нервная клетка) является особой биологической клеткой, которая обрабатывает информацию (рис. 1). Она состоит из тела клетки (cell body), или сомы (soma), и двух типов внешних древоподобных ветвей: аксона (axon) и дендритов (dendrites). Тело клетки включает ядро (nucleus), которое содержит информацию о наследственных свойствах, и плазму, обладающую молекулярными средствами для производства необходимых нейрону материалов. Нейрон получает сигналы (импульсы) от других нейронов через дендриты (приемники) и передает сигналы, сгенерированные телом клетки, вдоль аксона (передатчик), который в конце разветвляется на волокна (strands). На окончаниях этих волокон находятся синапсы (synapses).

Рис. 1.
Синапс является элементарной структурой и функциональным узлом между двумя нейронами (волокно аксона одного нейрона и дендрит другого). Когда импульс достигает синаптического окончания, высвобождаются определенные химические вещества, называемые нейротрансмиттерами. Нейротрансмиттеры диффундируют через синаптическую щель, возбуждая или затормаживая, в зависимости от типа синапса, способность нейрона-приемника генерировать электрические импульсы. Результативность синапса может настраиваться проходящими через него сигналами, так что синапсы могут обучаться в зависимости от активности процессов, в которых они участвуют. Эта зависимость от предыстории действует как память, которая, возможно, ответственна за память человека.
Кора головного мозга человека является протяженной, образованной нейронами поверхностью толщиной от 2 до 3 мм с площадью около 2200 см 2 , что вдвое превышает площадь поверхности стандартной клавиатуры. Кора головного мозга содержит около 1011 нейронов, что приблизительно равно числу звезд Млечного пути . Каждый нейрон связан с 103 - 104 другими нейронами. В целом мозг человека содержит приблизительно от 1014 до 1015 взаимосвязей.
Нейроны взаимодействуют посредством короткой серии импульсов, как правило, продолжительностью несколько мсек. Сообщение передается посредством частотно-импульсной модуляции. Частота может изменяться от нескольких единиц до сотен герц, что в миллион раз медленнее, чем самые быстродействующие переключательные электронные схемы. Тем не менее сложные решения по восприятию информации, как, например, распознавание лица, человек принимает за несколько сотен мс. Эти решения контролируются сетью нейронов, которые имеют скорость выполнения операций всего несколько мс. Это означает, что вычисления требуют не более 100 последовательных стадий. Другими словами, для таких сложных задач мозг "запускает" параллельные программы, содержащие около 100 шагов. Это известно как правило ста шагов . Рассуждая аналогичным образом, можно обнаружить, что количество информации, посылаемое от одного нейрона другому, должно быть очень маленьким (несколько бит). Отсюда следует, что основная информация не передается непосредственно, а захватывается и распределяется в связях между нейронами. Этим объясняется такое название, как коннекционистская модель, применяемое к ИНС.
Основные понятия
Модель технического нейрона
МакКаллок и Питтс предложили использовать бинарный пороговый элемент в качестве модели искусственного нейрона. Этот математический нейрон вычисляет взвешенную сумму n входных сигналов x j , j = 1, 2... n, и формирует на выходе сигнал величины 1, если эта сумма превышает определенный порог u, и 0 - в противном случае.
Часто удобно рассматривать u как весовой коэффициент, связанный с постоянным входом x 0 = 1. Положительные веса соответствуют возбуждающим связям, а отрицательные - тормозным. МакКаллок и Питтс доказали, что при соответствующим образом подобранных весах совокупность параллельно функционирующих нейронов подобного типа способна выполнять универсальные вычисления. Здесь наблюдается определенная аналогия с биологическим нейроном: передачу сигнала и взаимосвязи имитируют аксоны и дендриты, веса связей соответствуют синапсам, а пороговая функция отражает активность сомы.
Архитектура нейронной сети
ИНС может рассматриваться как направленный граф со взвешенными связями, в котором искусственные нейроны являются узлами. По архитектуре связей ИНС могут быть сгруппированы в два класса (рис. 2): сети прямого распространения, в которых графы не имеют петель, и рекуррентные сети, или сети с обратными связями.

Рис. 2.
В наиболее распространенном семействе сетей первого класса, называемых многослойным перцептроном, нейроны расположены слоями и имеют однонаправленные связи между слоями. На рис. 2 представлены типовые сети каждого класса. Сети прямого распространения являются статическими в том смысле, что на заданный вход они вырабатывают одну совокупность выходных значений, не зависящих от предыдущего состояния сети. Рекуррентные сети являются динамическими, так как в силу обратных связей в них модифицируются входы нейронов, что приводит к изменению состояния сети.
Обучение
Способность к обучению является фундаментальным свойством мозга. В контексте ИНС процесс обучения может рассматриваться как настройка архитектуры сети и весов связей для эффективного выполнения специальной задачи. Обычно нейронная сеть должна настроить веса связей по имеющейся обучающей выборке. Функционирование сети улучшается по мере итеративной настройки весовых коэффициентов. Свойство сети обучаться на примерах делает их более привлекательными по сравнению с системами, которые следуют определенной системе правил функционирования, сформулированной экспертами.
Для конструирования процесса обучения, прежде всего, необходимо иметь модель внешней среды, в которой функционирует нейронная сеть - знать доступную для сети информацию. Эта модель определяет парадигму обучения . Во-вторых, необходимо понять, как модифицировать весовые параметры сети - какие правила обучения управляют процессом настройки. Алгоритм обучения означает процедуру, в которой используются правила обучения для настройки весов.
Существуют три парадигмы обучения: "с учителем", "без учителя" (самообучение) и смешанная. В первом случае нейронная сеть располагает правильными ответами (выходами сети) на каждый входной пример. Веса настраиваются так, чтобы сеть производила ответы как можно более близкие к известным правильным ответам. Усиленный вариант обучения с учителем предполагает, что известна только критическая оценка правильности выхода нейронной сети, но не сами правильные значения выхода. Обучение без учителя не требует знания правильных ответов на каждый пример обучающей выборки. В этом случае раскрывается внутренняя структура данных или корреляции между образцами в системе данных, что позволяет распределить образцы по категориям. При смешанном обучении часть весов определяется посредством обучения с учителем, в то время как остальная получается с помощью самообучения.
Теория обучения рассматривает три фундаментальных свойства, связанных с обучением по примерам: емкость, сложность образцов и вычислительная сложность. Под емкостью понимается, сколько образцов может запомнить сеть, и какие функции и границы принятия решений могут быть на ней сформированы. Сложность образцов определяет число обучающих примеров, необходимых для достижения способности сети к обобщению. Слишком малое число примеров может вызвать "переобученность" сети, когда она хорошо функционирует на примерах обучающей выборки, но плохо - на тестовых примерах, подчиненных тому же статистическому распределению. Известны 4 основных типа правил обучения: коррекция по ошибке, машина Больцмана, правило Хебба и обучение методом соревнования.
Правило коррекции по ошибке. При обучении с учителем для каждого входного примера задан желаемый выход d. Реальный выход сети y может не совпадать с желаемым. Принцип коррекции по ошибке при обучении состоит в использовании сигнала (d-y) для модификации весов, обеспечивающей постепенное уменьшение ошибки. Обучение имеет место только в случае, когда перцептрон ошибается. Известны различные модификации этого алгоритма обучения .
Обучение Больцмана. Представляет собой стохастическое правило обучения, которое следует из информационных теоретических и термодинамических принципов . Целью обучения Больцмана является такая настройка весовых коэффициентов, при которой состояния видимых нейронов удовлетворяют желаемому распределению вероятностей. Обучение Больцмана может рассматриваться как специальный случай коррекции по ошибке, в котором под ошибкой понимается расхождение корреляций состояний в двух режимах.
Правило Хебба. Самым старым обучающим правилом является постулат обучения Хебба . Хебб опирался на следующие нейрофизиологические наблюдения: если нейроны с обеих сторон синапса активизируются одновременно и регулярно, то сила синаптической связи возрастает. Важной особенностью этого правила является то, что изменение синаптического веса зависит только от активности нейронов, которые связаны данным синапсом. Это существенно упрощает цепи обучения в реализации VLSI.
Обучение методом соревнования. В отличие от обучения Хебба, в котором множество выходных нейронов могут возбуждаться одновременно, при соревновательном обучении выходные нейроны соревнуются между собой за активизацию. Это явление известно как правило "победитель берет все". Подобное обучение имеет место в биологических нейронных сетях. Обучение посредством соревнования позволяет кластеризовать входные данные: подобные примеры группируются сетью в соответствии с корреляциями и представляются одним элементом.
При обучении модифицируются только веса "победившего" нейрона. Эффект этого правила достигается за счет такого изменения сохраненного в сети образца (вектора весов связей победившего нейрона), при котором он становится чуть ближе ко входному примеру. На рис. 3 дана геометрическая иллюстрация обучения методом соревнования. Входные векторы нормализованы и представлены точками на поверхности сферы. Векторы весов для трех нейронов инициализированы случайными значениями. Их начальные и конечные значения после обучения отмечены Х на рис. 3а и 3б соответственно. Каждая из трех групп примеров обнаружена одним из выходных нейронов, чей весовой вектор настроился на центр тяжести обнаруженной группы.

Рис. 3.
Можно заметить, что сеть никогда не перестанет обучаться, если параметр скорости обучения не равен 0. Некоторый входной образец может активизировать другой выходной нейрон на последующих итерациях в процессе обучения. Это ставит вопрос об устойчивости обучающей системы. Система считается устойчивой, если ни один из примеров обучающей выборки не изменяет своей принадлежности к категории после конечного числа итераций обучающего процесса. Один из способов достижения стабильности состоит в постепенном уменьшении до 0 параметра скорости обучения. Однако это искусственное торможение обучения вызывает другую проблему, называемую пластичностью и связанную со способностью к адаптации к новым данным. Эти особенности обучения методом соревнования известны под названием дилеммы стабильности-пластичности Гроссберга.
В Таблице 2 представлены различные алгоритмы обучения и связанные с ними архитектуры сетей (список не является исчерпывающим). В последней колонке перечислены задачи, для которых может быть применен каждый алгоритм. Каждый алгоритм обучения ориентирован на сеть определенной архитектуры и предназначен для ограниченного класса задач. Кроме рассмотренных, следует упомянуть некоторые другие алгоритмы: Adaline и Madaline , линейный дискриминантный анализ , проекции Саммона , анализ главных компонентов .
Таблица 2. Известные алгоритмы обучения
| Парадигма | Обучающее правило | Архитектура | Алгоритм обучения | Задача |
| С учителем | Коррекция ошибки | Однослойный и многослойный перцептрон |
Алгоритмы обучения перцептрона Обратное распространение Adaline и Madaline |
Классификация образов Аппроксимация функций Предскащание, управление |
| Больцман | Рекуррентная | Алгоритм обучения Больцмана | Классификация образов | |
| Хебб | Линейный дискриминантный анализ |
Анализ данных Классификация образов |
||
| Соревнование | Соревнование | Векторное квантование | Категоризация внутри класса Сжатие данных | |
| Сеть ART | ARTMap | Классификация образов | ||
| Без учителя | Коррекция ошибки | Многослойная прямого распространения | Проекция Саммона | Категоризация внутри класса Анализ данных |
| Хебб | Прямого распространения или соревнование | Анализ главных компонентов |
Анализ данных Сжатие данных |
|
| Сеть Хопфилда | Обучение ассоциативной памяти | Ассоциативная память | ||
| Соревнование | Соревнование | Векторное квантование |
Категоризация Сжатие данных |
|
| SOM Кохонена | SOM Кохонена |
Категоризация Анализ данных |
||
| Сети ART | ART1, ART2 | Категоризация | ||
| Смешанная | Коррекция ошибки и соревнование | Сеть RBF | Алгоритм обучения RBF |
Классификация образов Аппроксимация функций Предсказание, управление |
Многослойные сети прямого распространения
Стандартная L-слойная сеть прямого распространения состоит из слоя входных узлов (будем придерживаться утверждения, что он не включается в сеть в качестве самостоятельного слоя), (L-1) скрытых слоев и выходного слоя, соединенных последовательно в прямом направлении и не содержащих связей между элементами внутри слоя и обратных связей между слоями. На рис. 4 приведена структура трехслойной сети.

Рис. 4.
Многослойный перцептрон
Наиболее популярный класс многослойных сетей прямого распространения образуют многослойные перцептроны, в которых каждый вычислительный элемент использует пороговую или сигмоидальную функцию активации. Многослойный перцептрон может формировать сколь угодно сложные границы принятия решения и реализовывать произвольные булевы функции . Разработка алгоритма обратного распространения для определения весов в многослойном перцептроне сделала эти сети наиболее популярными у исследователей и пользователей нейронных сетей. Геометрическая интерпретация объясняет роль элементов скрытых слоев (используется пороговая активационная функция).
RBF-сети
Сети, использующие радиальные базисные функции (RBF-сети), являются частным случаем двухслойной сети прямого распространения. Каждый элемент скрытого слоя использует в качестве активационной функции радиальную базисную функцию типа гауссовой. Радиальная базисная функция (функция ядра) центрируется в точке, которая определяется весовым вектором, связанным с нейроном. Как позиция, так и ширина функции ядра должны быть обучены по выборочным образцам. Обычно ядер гораздо меньше, чем обучающих примеров. Каждый выходной элемент вычисляет линейную комбинацию этих радиальных базисных функций. С точки зрения задачи аппроксимации скрытые элементы формируют совокупность функций, которые образуют базисную систему для представления входных примеров в построенном на ней пространстве.
Существуют различные алгоритмы обучения RBF-сетей . Основной алгоритм использует двушаговую стратегию обучения, или смешанное обучение. Он оценивает позицию и ширину ядра с использованием алгоритма кластеризации "без учителя", а затем алгоритм минимизации среднеквадратической ошибки "с учителем" для определения весов связей между скрытым и выходным слоями. Поскольку выходные элементы линейны, применяется неитерационный алгоритм. После получения этого начального приближения используется градиентный спуск для уточнения параметров сети.
Этот смешанный алгоритм обучения RBF-сети сходится гораздо быстрее, чем алгоритм обратного распространения для обучения многослойных перцептронов. Однако RBF-сеть часто содержит слишком большое число скрытых элементов. Это влечет более медленное функционирование RBF-сети, чем многослойного перцептрона. Эффективность (ошибка в зависимости от размера сети) RBF-сети и многослойного перцептрона зависят от решаемой задачи.
Нерешенные проблемы
Существует множество спорных вопросов при проектировании сетей прямого распространения - например, сколько слоев необходимы для данной задачи, сколько следует выбрать элементов в каждом слое, как сеть будет реагировать на данные, не включенные в обучающую выборку (какова способность сети к обобщению), и какой размер обучающей выборки необходим для достижения "хорошей" способности сети к обобщению.
Хотя многослойные сети прямого распространения широко применяются для классификации и аппроксимации функций , многие параметры еще должны быть определены путем проб и ошибок. Существующие теоретические результаты дают лишь слабые ориентиры для выбора этих параметров в практических приложениях.
Самоорганизующиеся карты Кохонена
Самоорганизующиеся карты Кохонена (SOM) обладают благоприятным свойством сохранения топологии, которое воспроизводит важный аспект карт признаков в коре головного мозга высокоорганизованных животных. В отображении с сохранением топологии близкие входные примеры возбуждают близкие выходные элементы. На рис. 2 показана основная архитектура сети SOM Кохонена. По существу она представляет собой двумерный массив элементов, причем каждый элемент связан со всеми n входными узлами.
Такая сеть является специальным случаем сети, обучающейся методом соревнования, в которой определяется пространственная окрестность для каждого выходного элемента. Локальная окрестность может быть квадратом, прямоугольником или окружностью. Начальный размер окрестности часто устанавливается в пределах от 1/2 до 2/3 размера сети и сокращается согласно определенному закону (например, по экспоненциально убывающей зависимости). Во время обучения модифицируются все веса, связанные с победителем и его соседними элементами.
Самоорганизующиеся карты (сети) Кохонена могут быть использованы для проектирования многомерных данных, аппроксимации плотности и кластеризации. Эта сеть успешно применялась для распознавания речи, обработки изображений, в робототехнике и в задачах управления . Параметры сети включают в себя размерность массива нейронов, число нейронов в каждом измерении, форму окрестности, закон сжатия окрестности и скорость обучения.
Модели теории адаптивного резонанса
Напомним, что дилемма стабильности-пластичности является важной особенностью обучения методом соревнования. Как обучать новым явлениям (пластичность) и в то же время сохранить стабильность, чтобы существующие знания не были стерты или разрушены?
Карпентер и Гроссберг, разработавшие модели теории адаптивного резонанса (ART1, ART2 и ARTMAP) , сделали попытку решить эту дилемму. Сеть имеет достаточное число выходных элементов, но они не используются до тех пор, пока не возникнет в этом необходимость. Будем говорить, что элемент распределен (не распределен), если он используется (не используется). Обучающий алгоритм корректирует имеющийся прототип категории, только если входной вектор в достаточной степени ему подобен. В этом случае они резонируют. Степень подобия контролируется параметром сходства k, 0
Чтобы проиллюстрировать модель, рассмотрим сеть ART1, которая рассчитана на бинарный (0/1) вход. Упрощенная схема архитектуры ART1 представлена на рис. 5. Она содержит два слоя элементов с полными связями.

Рис. 5.
Направленный сверху вниз весовой вектор w j соответствует элементу j входного слоя, а направленный снизу вверх весовой вектор i связан с выходным элементом i; i является нормализованной версией w i . Векторы w j сохраняют прототипы кластеров. Роль нормализации состоит в том, чтобы предотвратить доминирование векторов с большой длиной над векторами с малой длиной. Сигнал сброса R генерируется только тогда, когда подобие ниже заданного уровня.
Модель ART1 может создать новые категории и отбросить входные примеры, когда сеть исчерпала свою емкость. Однако число обнаруженных сетью категорий чувствительно к параметру сходства.
Сеть Хопфилда
Хопфилд использовал функцию энергии как инструмент для построения рекуррентных сетей и для понимания их динамики . Формализация Хопфилда сделала ясным принцип хранения информации как динамически устойчивых аттракторов и популяризовала использование рекуррентных сетей для ассоциативной памяти и для решения комбинаторных задач оптимизации.
Динамическое изменение состояний сети может быть выполнено по крайней мере двумя способами: синхронно и асинхронно. В первом случае все элементы модифицируются одновременно на каждом временном шаге, во втором - в каждый момент времени выбирается и подвергается обработке один элемент. Этот элемент может выбираться случайно. Главное свойство энергетической функции состоит в том, что в процессе эволюции состояний сети согласно уравнению она уменьшается и достигает локального минимума (аттрактора), в котором она сохраняет постоянную энергию.
Ассоциативная память
Если хранимые в сети образцы являются аттракторами, она может использоваться как ассоциативная память. Любой пример, находящийся в области притяжения хранимого образца, может быть использован как указатель для его восстановления.
Ассоциативная память обычно работает в двух режимах: хранения и восстановления. В режиме хранения веса связей в сети определяются так, чтобы аттракторы запомнили набор p n-мерных образцов {x 1 , x 2 ,..., x p ), которые должны быть сохранены. Во втором режиме входной пример используется как начальное состояние сети, и далее сеть эволюционирует согласно своей динамике. Выходной образец устанавливается, когда сеть достигает равновесия.
Сколько примеров могут быть сохранены в сети с n бинарными элементами? Другими словами, какова емкость памяти сети? Она конечна, так как сеть с n бинарными элементами имеет максимально 2n различных состояний, и не все из них являются аттракторами. Более того, не все аттракторы могут хранить полезные образцы. Ложные аттракторы могут также хранить образцы, но они отличаются от примеров обучающей выборки. Показано, что максимальное число случайных образцов, которые может хранить сеть Хопфилда, составляет Pmax (0.15 n. Когда число сохраняемых образцов p (0.15 n, достигается наиболее успешный вызов данных из памяти. Если запоминаемые образцы представлены ортогональными векторами (в отличие от случайных), то количество сохраненных в памяти образцов будет увеличиваться. Число ложных аттракторов возрастает, когда p достигает емкости сети. Несколько правил обучения предложено для увеличения емкости памяти сети Хопфилда . Заметим, что в сети для хранения p n-битных примеров требуется реализовать 2n связей.
Минимизация энергии
Сеть Хопфилда эволюционирует в направлении уменьшения своей энергии. Это позволяет решать комбинаторные задачи оптимизации, если они могут быть сформулированы как задачи минимизации энергии. В частности, подобным способом может быть сформулирована задача коммивояжера.
Приложения
В начале статьи были описаны 7 классов различных приложений ИНС. Следует иметь в виду, что для успешного решения реальных задач необходимо определить ряд характеристик, включая модель сети, ее размер, функцию активации, параметры обучения и набор обучающих примеров. Для иллюстрации практического применения сетей прямого распространения рассмотрим проблему распознавания изображений символов (задача OCR, которая состоит в обработке отсканированного изображения текста и его преобразовании в текстовую форму).
Система OCR
Система OCR обычно состоит из блоков препроцессирования, сегментации, выделения характеристик, классификации и контекстуальной обработки. Бумажный документ сканируется, и создается изображение в оттенках серого цвета или бинарное (черно-белое) изображение. На стадии препроцессирования применяется фильтрация для удаления шума, область текста локализуется и преобразуется к бинарному изображению с помощью глобального и локального адаптивного порогового преобразователя. На шаге сегментации изображение текста разделяется на отдельные символы. Эта задача особенно трудна для рукописного текста, который содержит связи между соседними символами. Один из эффективных приемов состоит в расчленении составного образца на малые образцы (промежуточная сегментация) и нахождении точек правильной сегментации с использованием выхода классификатора по образцам. Вследствие различного наклона, искажений, помех и стилей письма распознавание сегментированных символов является непростой задачей.
Схемы вычислений
На рис. 6 представлены две основные схемы использования ИНС в OCR системах. Первая выполняет явное извлечение характерных признаков (не обязательно на нейронной сети). Например, это могут быть признаки обхода по контуру. Выделенные признаки подаются на вход многослойной сети прямого распространения . Эта схема отличается гибкостью в отношении использования большого разнообразия признаков. Другая схема не предусматривает явного выделения признаков из исходных данных. Извлечение признаков происходит неявно в скрытых слоях ИНС. Удобство этой схемы состоит в том, что выделение признаков и классификация объединены и обучение происходит одновременно, что дает оптимальный результат классификации. Однако схема требует большего размера сети, чем в первом случае.

Рис. 6.
Типичный пример подобной интегрированной схемы рассмотрен Куном для распознавания zip-кода.
Результаты
ИНС очень эффективно применяются в OCR-приложениях. Однако, нет убедительных доказательств их превосходства над соответствующими статистическими классификаторами. На первой конференции по OCR-системам в 1992 г. более 40 систем распознавания рукописного текста были сопоставлены для одних и тех же данных. Из них 10 лучших использовали вариант многослойной сети прямого распространения или классификатор "ближайшего соседа". ИНС имеют тенденцию к превосходству по скорости и требуемой памяти по сравнению с методом "ближайшего соседа", в отличие от которого скорость классификации с применением ИНС не зависит от объема обучающей выборки. Точность распознавания лучших OCR-систем на базе данных предварительно сегментированных символов составила около 98% для цифр, 96% для заглавных букв и 87 - для строчных. (Низкая точность для строчных букв вызвана в значительной степени тем, что тестовые данные существенно отличались от тренировочных.) По данным теста можно сделать вывод, что на изолированных символах OCR система близка по точности к человеку. Однако человек опережает системы OCR на свободных от ограничений и рукописных документах.
***
Развитие ИНС вызвало немало энтузиазма и критики. Некоторые сравнительные исследования оказались оптимистичными, другие - пессимистичными. Для многих задач, таких как распознавание образов, пока не создано доминирующих подходов. Выбор лучшей технологии должен диктоваться природой задачи. Нужно пытаться понять возможности, предпосылки и область применения различных подходов и максимально использовать их дополнительные преимущества для дальнейшего развития интеллектуальных систем. Подобные усилия могут привести к синергетическому подходу, который объединяет ИНС с другими технологиями для существенного прорыва в решении актуальных проблем. Как недавно заметил Минский, пришло время строить системы за рамками отдельных компонентов. Индивидуальные модули важны, но мы также нуждаемся в методологии интеграции. Ясно, что взаимодействие и совместные работы исследователей в области ИНС и других дисциплин позволят не только избежать повторений, но и (что более важно) стимулируют и придают новые качества развитию отдельных направлений.
Литература
1. DARPA Neural Network Study, AFCEA Int"l Press, Fairfax, Va., 1988.
2. J. Hertz, A. Krogh, and R.G. Palmer, Introduction to the Theory of Neural Computation, Addison-Wesley, Reading, Mass., 1991.
3. S. Haykin, Neural Networks: A Comprehensive Foundation, MacMillan College Publishing Co., New York, 1994.
4. W.S. McCulloch and W. Pitts, "A logical Calculus of Ideas Immanent in Nervous Activity", Bull. Mathematical Biophysics, Vol. 5, 1943, pp. 115-133.
5. R.Rosenblatt, "Principles of Neurodynamics", Spartan Books, New York, 1962.
6. M. Miтnsky and S. Papert, "Perceptrons: An Introduction to Computational Geometry", MIT Press, Cambridge, Mass., 1969.
7. J.J. Hopfield, "Neural Networks and Physical Systems with Emergent Collective Computational Abilities", in Proc. National Academy of Sciencies, USA 79, 1982, pp. 2554-2558.
8. P. Werbos, "Beyond Regression: New Tools for Prediction and Analysis in the Behavioral Sciences", Phd Thesis, Dept. of Applied Mathematics, Harvard University, Cambridge, Mass., 1974.
9. D.E. Rumelhart and J.L. McClelland, Parallel Distributed Processing: Exploration in the Microstructure of Cognition, MIT Press, Cambridge, Mass., 1986.
10. J.A. Anderson and E. Rosenfeld, "Neurocomputing: Foundation of Research", MIT Press, Cambridge, Mass., 1988.
11. S. Brunak and B. Lautrup, Neural Networks, Computers with Intuition, World Scientific, Singapore, 1990.
12. J. Feldman, M.A. Fanty, and N.H. Goddard, "Computing with Structured Neural Networks", Computer, Vol. 21, No. 3, Mar.1988, pp. 91-103.
13. D.O. Hebb, The Organization of Behavior, John Wiley & Sons, New York, 1949.
14. R.P.Lippmann, "An Introduction to Computing with Neural Nets", IEEE ASSP Magazine, Vol.4, No.2, Apr. 1987, pp. 4-22.
15. A.K. Jain and J. Mao, "Neural Networks and Pattern Recognition", in Computational Intelligence: Imitating Life, J.M. Zurada, R.J. Marks II, and C.J. Robinson, eds., IEEE Press, Piscataway, N.J., 1994, pp. 194-212.
16. T. Kohonen, SelfOrganization and Associative Memory, Third Edition, Springer-Verlag, New York, 1989.
17. G.A.Carpenter and S. Grossberg, Pattern Recognition by SelfOrganizing Neural Networks, MIT Press, Cambridge, Mass., 1991.
18. "The First Census Optical Character Recognition System Conference", R.A.Wilkinson et al., eds., . Tech. Report, NISTIR 4912, US Deop. Commerse, NIST, Gaithersburg, Md., 1992.
19. K. Mohiuddin and J. Mao, "A Comparative Study of Different Classifiers for Handprinted Character Recognition", in Pattern Recognition in Practice IV, E.S. Gelsema and L.N. Kanal, eds., Elsevier Science, The Netherlands, 1994, pp. 437-448.
20. Y.Le Cun et al., "Back-Propagation Applied to Handwritten Zip Code Recognition", Neural Computation, Vol 1, 1989, pp. 541-551.
21. M. Minsky, "Logical Versus Analogical or Symbolic Versus Connectionist or Neat Versus Scruffy", AI Magazine, Vol. 65, No. 2, 1991, pp. 34-51.
Анил К. Джейн ([email protected]) - Мичиганский университет; Жианчанг Мао, К М. Моиуддин - Исследовательский Центр IBM в Альмадене.
Anil K., Jain, Jianchang Mao, K.M. Mohiuddin. Artificial Neural Networks: A Tutorialп, IEEE Computer, Vol.29, No.3, March/1996, pp. 31-44. IEEE Computer Society. All rights reserved. Reprinted with permission.






